👩🏻💻 Introducción
Un sensor de distancia utiliza el mismo principio que utilizan los murciélagos para volar sin chocar con objetos. Emiten unas ondas de ultrasonidos y si estas vuelven quiere decir que hay un objeto delante de nosotros, y entonces se decidirá si esquivarlo o ir a por él. En función de lo que tarden estas ondas en ir y volver se puede determinar si el objeto se encuentra más cerca o más lejos.
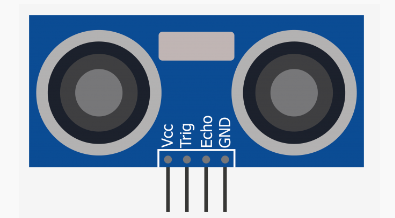
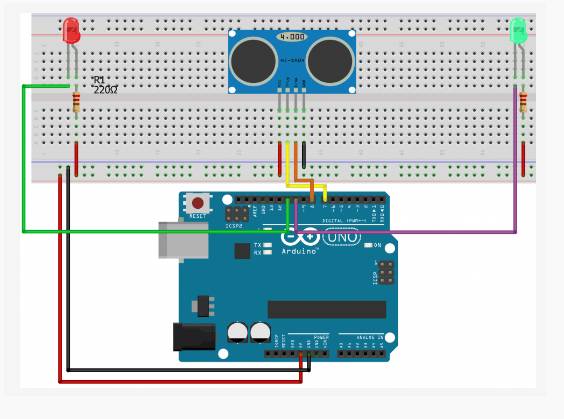
El sensor de ultrasonidos está formado por 2 módulos diferentes: un emisor y un receptor. El emisor emite unas ondas de ultrasonidos, que son unas ondas sonoras que nosotros no podemos escuchar (como las de los murciélagos). Estas avanzan hasta encontrar obstáculos y, cuando los encuentran, rebotan hacia el sensor, hasta que el ultrasonido es detectado por el módulo receptor.
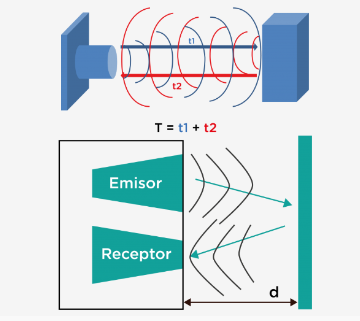
Debido a que las ondas sonoras siempre viajan a la misma velocidad, cuando se desplazan por el aire (343 m/s), para saber a qué distancia se encuentra el objeto detectado se debe medir el tiempo que tarda la onda en ir y volver, y dividirlo entre dos. El número resultante será el tiempo que ha tardado desde que hemos emitido el ultrasonido hasta que ha chocado con el objeto, y no el tiempo desde que ha salido hasta que ha llegado.
Una vez que sabemos cuánto tiempo han tardado las ondas sonoras en chocar con el objeto, debemos multiplicar el tiempo de ida por la velocidad a la que viajan las ondas, y obtendremos la distancia:
Distancia = 343m/s * tiempo (segundos)
Si la onda de ultrasonidos no vuelve, significa que no hay ningún obstáculo y el sensor informará de que no hay nada delante suyo.